Writing driver for ATA disks was fun in it's own way, there was open
documentation & free access to standards, as opposed to the horrific
mess that eg. VGA is... And as this driver will be operating as part
of very minimalistic BIOS, it can be made to be pretty dumb & use
PIO mode.
Even if PIO is very cpu exhausting & slow way to read disks, it's
required to be supported by all ATA-compliant drives. This makes my
life a lot easier, as I don't have to think of all differend kinds of
ATA disks out there.
The PIO mode basicly works over IO bus of cpu, instead of being memory
mapped IO. This restricts the speed of disk operations to 16MB/s at
highest, and prevents other processes running during the disk opers.
That isn't really an issue here, because our BIOS has no actual reason
to be multi-threaded, and we're only interested in reading the first
512 bytes of our boot disk for now.
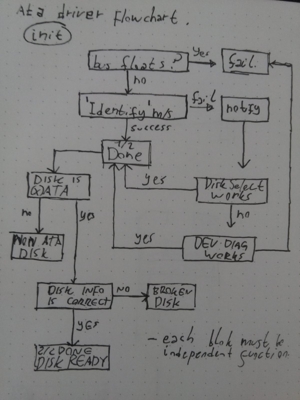
Even if PIO mode is pretty straightforward and simple, I wasn't very
familiar with disk driver developement. I kept on trying to write
the driver w/o proper planning for atleast a week or so, before giving
up & listening to people who told me I'd need to plan the driver with
pen and paper to make it more clear.. Below is a small 'flowchart'
I eventually came up with, after throughly reading through osdev wiki
about ata pio for 10th time.
So now I had a clear idea about how-to implement the driver, and goal
for each of the functions I'd be writing. There were few more weird
things to realize & get right, such as the ~400ns delays to make sure
that there's enoguh time for these slow disks to push correct voltages
onto the bus. Overall, there were quite a few weird quirks during the
project that I didn't take into account & spent time banging my head
to wall with:
- There needs to be that +400ns delay I mentioned when running
outside emulators/vms
- Cache might need to be manually flushed, some drives don't
flush the cache for you, which might lead to write operations
invisibly failing.
- Believe it or not, disks might have bad sectors & writes may
fail, all kinda weird stuff happens :)
As I mentioned earlier, this driver was coming for BIOS, so it doesn't
need to be very fancy nor does it need to support multi-threading etc.
Ofc, it'd be nice to make it 'proper' at somepoint and get rid of
polling disks for data. Currently disk read/write works according
the ascii flowchart below:
+---------------------- YES ---+
V |
Disk select works? -- NO --> Retry after reset works?
| |
YES NO
| |
| V
| Disk has hung. exit
V
ABORT <---- NO ------ Disk R/W params are correct?
|
YES
|
V
+-----------+--------> Read/Write operation ok? -- YES --> DONE
^ ^ |
| | NO
| | |
| TMP Bad block <-- YES -- Write works?
| do reset |
| NO
| |
| V
+---- Do reset <-- NO -- Other blocks work?
^ |
| YES
| |
| V
+----------------- Permanently bad block, change block
I think that the flowchart started with only checks of wheter
disk select works or not, and parameter check, but when when testing
stuff, I eventually added more and more stuff to code+flow chart..
The next steps for the driver would probably be to use PCI for disk
detection incase non-standard IO location is used, and change the
read operations to be interrupt-driven instead of current way of
polling.. We'll see when I have motivation to finish the driver /
abstraction for pci to make that happen.. Hopefully during next weeks.
I'm not entirelly sure how cpu side of ata bus is wired to achieve
this, and I don't think it'd be too hard to find out, but anyway for
now it remains a mystery.. ata bus with no disks 'floats' at constant
+5 volts (or whatever voltage your machine uses to indicate high),
resulting to reads from bus to return all 1's. Specs tell us it's
enough to check if bits 1 and 2 of status register are both 1s, as this
should never be the case, but I think it's more neat to just do
mov dx, ATA_STATUS_REGISTER
in al, dx
cmp al, 0xFF
Because if the bus floats & as result all we read is 1s, we can just
compare against 1111 1111 (FF) just as well.. This way we know that
there really is nothing connected, but with status bits 1 and 2 being
1's, but others still being eg 0, we can assume *something* is either
connected to the bus, or broken.